

1. 서 론
최근 100세 시대가 도래하면서 개인 건강에 대한 관심이 그 어느 때보다 높아지고 있으며, 이러한 시대적 흐름을 반영하여 현재 다양한 센서(sensor)를 집적한 피부 부착형 플랫폼(skin-attachable platform)을 기반으로 인간의 건강이나 움직임 정보를 실시간으로 모니터링(monitoring)하기 위한 착용형 센서 시스템(wearable sensor system) 개발을 위한 연구가 활발히 진행되고 있다.1,2,3,4,5,6) 착용형 센서 시스템은 일반적으로 신축성이 있는 탄성 인쇄회로기판(elastic printed circuit board, EPCB)에 인체 신호 감지를 위한 센서와 획득한 센서 신호의 전송을 위한 회로 모듈을 집적하는 형태로 구현된다. 이러한 착용형 센서 시스템이 인체 피부에 직접 부착되어 유용한 정보를 안정적으로 획득하기 위해서는 센서 시스템의 기반이 되는 EPCB가 신체의 다양한 움직임에 따라 발생되는 외력에 대해서도 기계적/전기적 안정성을 유지할 수 있어야 한다.
최근 주목할 만한 발전을 거듭하고 있는 기능성 신소재 및 전통적/비전통적 미세 공정기술을 바탕으로 EPCB는 현재 다양한 구조로 구현되고 있다. 특히 EPCB 상 전도성 회로 패턴을 형성하기 위해서 반도체 및 멤스(MEMS) 일괄 공정 기술이나 다양한 프린팅(printing) 기술을 기반으로 한 직접 그리기(direct writing) 전략이 주로 적용되고 있다.7,8,9,10,11,12,13,14,15,16,17,18) 예를 들어 미국 노스웨스턴 대학의 J. A. Rogers 교수 연구팀 등은 전통적인 마이크로머시닝(micromachining) 공정이나 레이저 새김(laser-engraving) 기술을 이용하여 구불구불한(serpentine) 형상의 레이아웃(layout)으로 금속 박막 또는 시트(sheet)를 미세하게 패터닝(patterning)하고, 신축성 기판과 집적하는 전략으로 EPCB를 구현하였다.7,8,9,10,11,12) 회로 패턴 직접 그리기 공정은 주로 노즐 프린팅(nozzle printing) 기술이나 스크린 프린팅(screen printing) 기술 등을 이용하여 전도성 잉크(conductive ink)를 대상 기판에 선택적으로 전사하는 방식으로 진행되었다.13,14,15,16,17,18) 예를 들어 미국 하버드 대학의 J. A. Lewis 교수 연구팀은 미세 은 플레이크(silver flake)와 열가소성 폴리우레탄(thermoplastic polyurethane, TPU)을 혼합하여 전도성 복합체 잉크를 합성하고, 이를 3D 프린팅 기술을 이용하여 신축성 TPU 기판에 직접 그려 회로 패턴을 형성하였다. 특히 픽 앤 플레이스(pick-and-place) 기술을 이용하여 신축성 기판에 위치시킨 전자 소자나 모듈에 정렬하여 회로 패턴을 그리는 과정을 통해 착용형 회로 시스템을 성공적으로 구현하였다.13) 하지만 현재 보고되고 있는 착용형 센서 시스템 기술은 대체로 EPCB를 제작하기 위한 전체 공정이 복잡하거나 회로 패턴 형성을 위해 특별한 공정 장비가 요구되는 등의 문제점을 드러내고 있는 실정이다.
본 연구에서는 기존 착용형 센서 시스템 기술의 한계를 극복하기 위해 전도성 폴리머 복합체 필름(conductive polymer composite film)의 직접 컷 패터닝(direct cut patterning) 기반의 EPCB 기술19)을 확장하여 실시간 인체 움직임 모니터링을 위한 보다 간단하고 경제적이면서도 기계적, 전기적으로 안정한 착용형 시스템 기술을 제안한다. 이러한 전도성 폴리머 복합체 전극 기반의 EPCB 기술은 다양한 센서 및 회로 칩(chip)을 집적(integration)하기에 용이할 뿐만 아니라 패턴 최적 설계 및 일괄 공정 적용을 통한 폴리머 복합체 센서와의 일체형 집적으로 인체에 안정적으로 밀착되어 실시간 움직임 정보 신호를 정확하게 획득할 수 있도록 하는 실용적인 착용형 센서 시스템 개발을 가능하게 할 것으로 기대된다. 이러한 가능성을 검증하기 위해 본 연구에서는 직접 컷 패터닝 기술 기반의 신축성 회로 기판19)과 저항형 스트레인 센서(resistive strain sensor)20)를 일체형으로 집적하고 상용화된 온도 센서 칩과 회로 소자를 마운팅하여 피부 부착형 무선 센서 시스템을 구현하였다. 이를 기반으로 인체의 움직임과 주변 온도 정보를 실시간으로 모니터링함으로써 제안하는 착용형 센서 시스템 기술의 실효성을 실험적으로 검증하였다.
2. 실험 방법
2.1. 신축성 회로 기판 제작
본 연구에서 제안하는 센서 시스템의 기반이 되는 핵심 구조인 EPCB는 직접 컷 패터닝 기술을 이용하여 전도성 폴리머 복합체 기반의 신축성 회로 기판과 신축성 스트레인 센서를 일체형으로 집적하여 제작하였다.21) 제작 과정을 간단히 정리하면 다음과 같다. 먼저 폴리올 공정(polyol process)을 통해 합성된 은 나노선(silver nanowire, AgNW)을 스프레이 코팅(spray coating) 공정을 이용하여 유리 기판에 코팅하였다. 200 °C에서 1 h 동안 열처리 후 신축성 폴리머인 드래곤 스킨(dragon skin, DS) 주제와 경화제를 1:1 질량비로 혼합하여 AgNW 코팅층에 붓고 70 °C에서 45 min 열경화를 진행하여 AgNW/DS 복합체 필름 영역을 정의하였다. 그 후 컴퓨터 제어 커팅 플로터(computer-controlled cutting plotter)를 이용한 직접 컷 패터닝 기술을 기반으로 스트레인 센서 영역, 소자 마운팅 영역 및 배선(interconnection) 영역을 구분하여 정의하였다. 마지막으로 DS 기판층 형성 및 추가 컷 공정을 진행하여 신축성 스트레인 센서가 일체형으로 집적된 AgNW/DS 기반 EPCB 제작을 완료하였다.
2.2. 신축성 센서 시스템 제작
본 연구에서 제안하는 착용형 센서 시스템은 스트레인 센서가 일체형으로 집적된 EPCB에 각종 회로 소자 및 모듈(공진기, 스위치, 수동 소자, 마이크로컨트롤러(MCU), 블루투스(Bluetooth) 모듈 등), 온도 센서 칩, LED 인디케이터(indicator) 모듈을 직접 마운팅하여 제작하였다. 이때 소자와 EPCB 간 물리적/전기적 연결을 위해 먼저 섀도우 마스크(shadow mask) 기반의 스퀴징(squeezing) 공정을 적용하여 먼저 전도성 에폭시(conductive epoxy) 패턴을 소자 집적 영역에 정렬하여 형성하였으며, 소자 마운팅 후에는 70 °C에서 2 h 동안 열처리하여 고정시켰다.
2.3. 특성 평가
본 연구에서 제안하는 피부 부착형 센서 시스템의 실시간 성능 평가를 위해서 먼저 제작된 센서 시스템을 사용자가 착용한 니트릴 장갑(nitrile glove)의 손목 위치에 테이프(tape)를 이용하여 견고하게 밀착하여 부착하였다. 손목의 움직임에 따른 저항형 스트레인 센서의 저항 변화 및 온도 센서 출력 신호는 MCU 신호처리 후 블루투스 모듈을 통해 소프트웨어가 설치된 컴퓨터로 무선으로 전송하여 실시간으로 모니터링함으로써 제안 기술의 실용성을 평가하였다.
3. 결과 및 고찰
Fig. 1은 본 연구에서 제안하는 신축성 스트레인 센서가 일체형으로 집적된 전도성 폴리머 복합체 기반 EPCB의 설계 레이아웃(layout)을 보여준다. 본 연구에서 제안하는 AgNW/DS EPCB는 크게 세 파트로 나누어지며, Fig. 1에서 볼 수 있는 바와 같이 i) 스트레인 센서 파트, ii) 신축성 배선 파트 및 iii) 소자 마운팅 파트로 구분하여 설계하였다. 특히 신축성 배선 파트는 센서 소자와 연결될 수 있도록 설계하여 센서의 출력 특성이 의도치 않은 기계적인 외력에 의해 왜곡되는 것을 방지하고자 하였다.
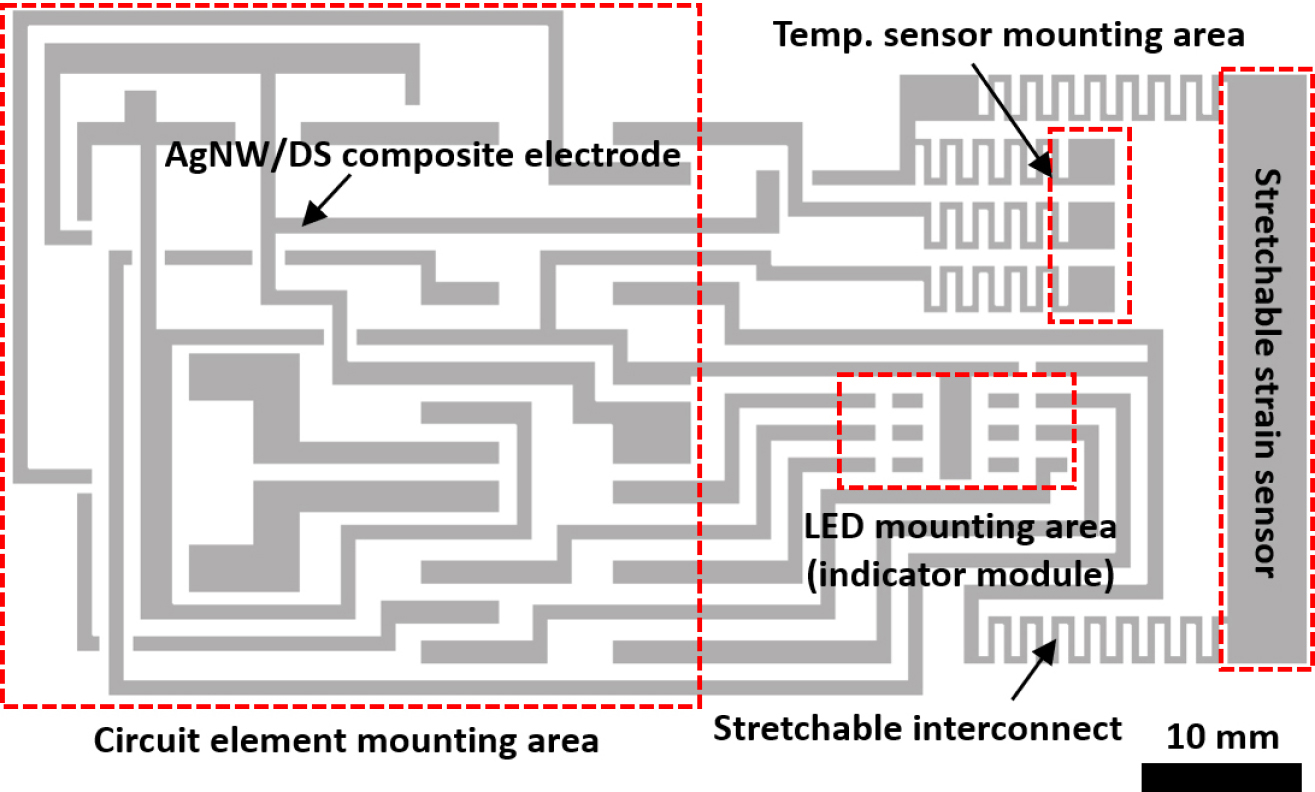
Fig. 2는 설계된 AgNW/DS EPCB 구조를 제작하기 위한 공정 과정 모식도를 나타낸다. Fig. 2에서 볼 수 있는 바와 같이 AgNW/DS EPCB는 기계적으로 안정한 구조적인 특징과 더불어 AgNW/DS 전도성 복합체 합성 및 기계적인 직접 컷 패터닝 기술을 기반으로 간단하고 빠르게 구현될 수 있는 장점이 있어 차세대 신축성 시스템의 핵심 기반 기술로 활용될 수 있는 가능성이 충분하다고 판단된다.
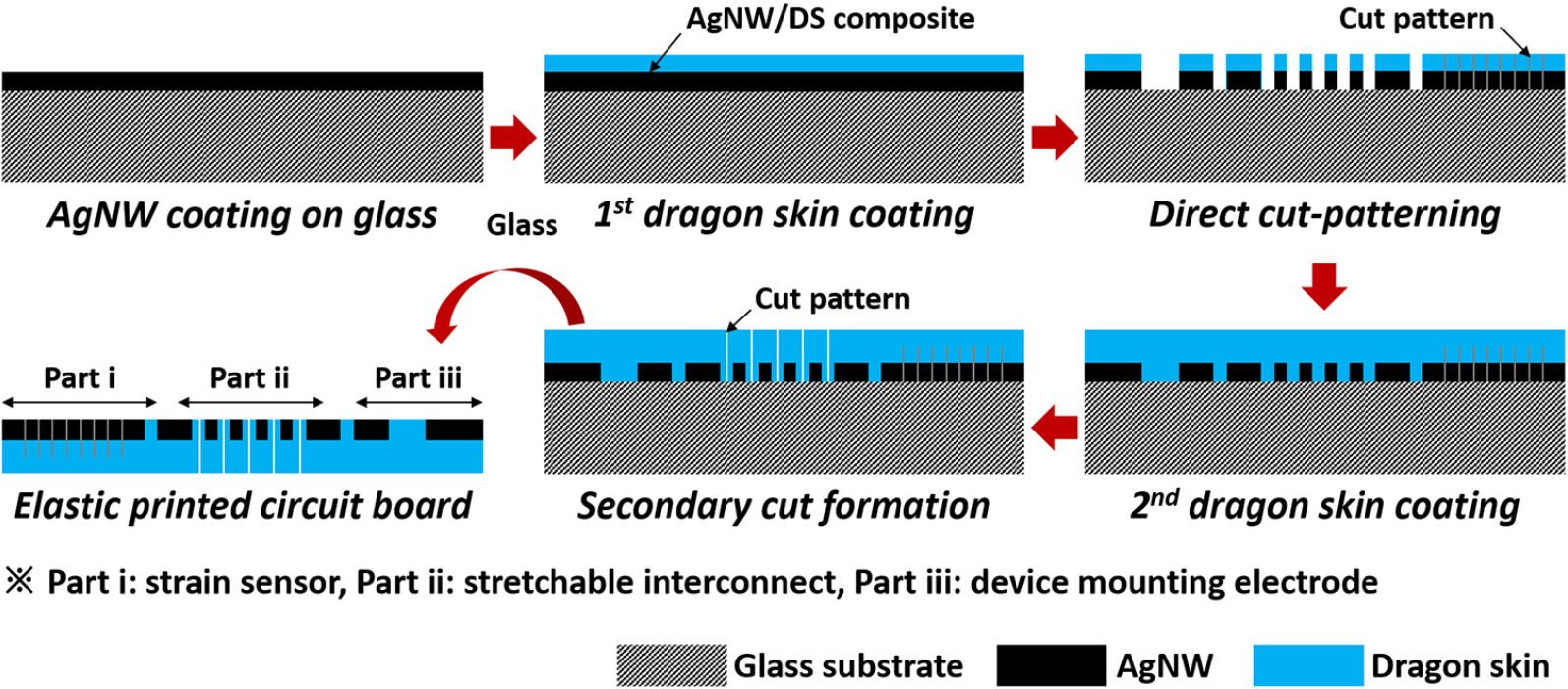
Fig. 3은 본 연구에서 제안하는 피부 부착형 AgNW/DS EPCB의 제작 결과를 보여준다. Fig. 3(a)에서 볼 수 있는 바와 같이 제작된 EPCB는 Fig. 1에 나타낸 설계 레이아웃대로 세 파트로 구분되어 안정적으로 제작되었다. 신축성 배선 구조의 폴리머 컷 패턴[Fig. 3(b)]과 스트레인 센서의 복합체 상 컷 패턴[Fig. 3(c)]도 설계된 위치에 명확하게 정의되었음을 확인할 수 있다. 이는 본 연구에서 제안하는 AgNW/DS EPCB가 캐드(CAD) 기반의 컴퓨터 제어 자동 플로터를 기반으로 제작되므로 전도성 폴리머 복합체 설계 형상을 비교적 정밀하게 구현할 수 있기 때문이다. 본 연구에서는 EPCB 제작을 위해 상용 플로터 장비를 사용하였는데 향후 보다 정밀한 시스템을 활용할 경우 정렬 오차 등을 줄여 공정의 신뢰성 및 재현성을 높일 수 있을 것으로 기대된다. 또한 소자 마운팅 및 회로 기판과의 전기적인 연결을 위한 전도성 에폭시도 섀도우 마스크를 회로 패턴에 정렬하여 선택적으로 스퀴징함으로써 설계 위치에 정확하게 패터닝할 수 있었다[Fig. 3(a)].
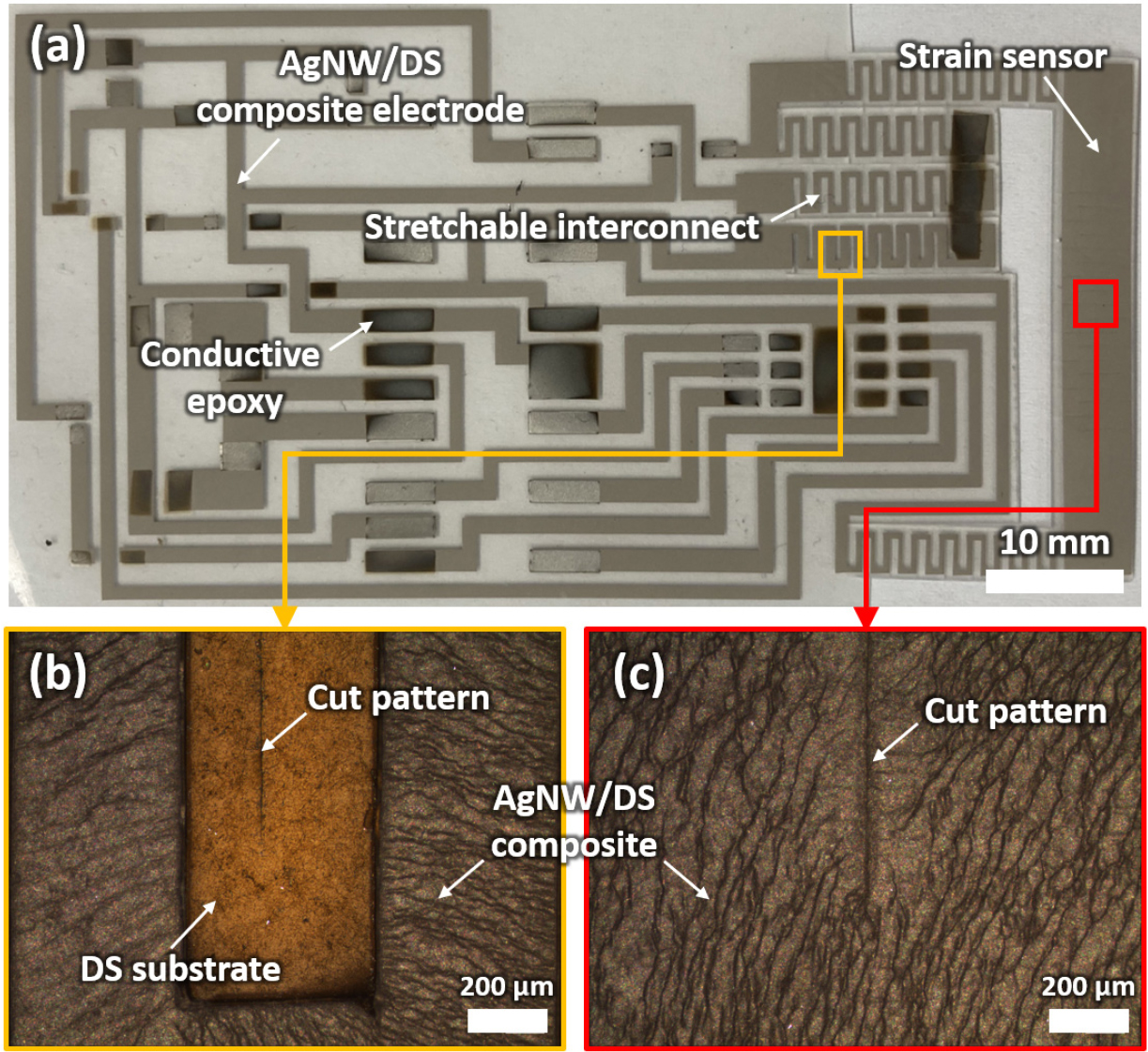
Fig. 4는 제작된 피부 부착형 센서 시스템의 디지털 이미지(digital image)를 보여준다. MCU 모듈은 EPCB 상 전도성 에폭시 패턴에 마운팅된 28핀 소켓(socket)에 꽂는 형태로 연결되었으며, 그 외 회로 소자(공진기, 스위치, LED 칩, 수동 소자 등) 및 블루투스 모듈은 직접 마운팅되어 전도성 에폭시 패턴과 접합되어 있음을 확인할 수 있다. 또한 신체의 움직임에 의해 유도되는 센서 시스템의 물리적인 변형에 대해서도 안정적인 출력 특성을 확보하기 위해 온도 센서는 신축성 배선 구조와 연결되도록 시스템을 구현하였다. LED 인디케이터 모듈을 구성하기 위해 총 6개의 단위 LED 칩이 사용되었으며, 스트레인 센서 및 온도 센서에 대해 각각 3개씩 연결되어 각 센서의 출력의 크기 레벨(level)에 따라 LED가 순차적으로 점등될 수 있도록 제작되었다. 본 논문에서 제안하는 착용형 센서 시스템 기술은 다양한 단위 센서를 효율적으로 집적할 수 있는 가능성이 높음에도 Table 1에 정리한 바와 같이 다른 유사 기술에 비해 간단한 구조 및 공정을 통해 구현될 수 있다는 장점을 갖는다.
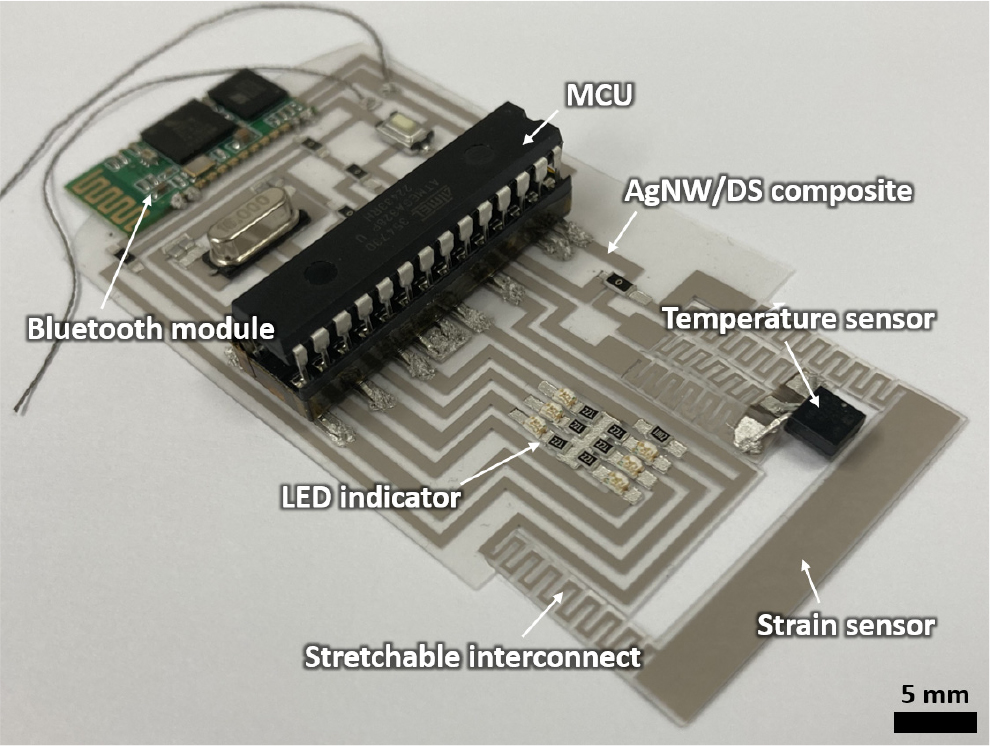
Table 1.
Comparison of wearable systems in terms of their architectures and fabrication strategies.
| Conductor materialsConductor patterning | Stretchable interconnect | Ref. | |
| Microfabrication |
∙ metal films (Au, Cu)7,8,9,10) ∙ Cu sheets11) |
∙ 3D helical coil7) ∙ meander/serpentine design8,10,11) ∙ micro-cracked metal film9) | 7-11 |
| Laser machining | ∙ Cu foils | ∙ serpentine design | 12 |
| Direct ink writing | ∙ composite inks: Ag/TPU,13) Ga/Cu,14) Ag/In/Ga15) | ∙ composite interconnects | 13-15 |
| Inkjet printing | ∙ AgNP inks |
∙ wrinkled films16) ∙ flexible conductors17) | 16,17 |
| Screen printing | ∙ composite ink (Ag-based) | ∙ composite interconnects | 18 |
| Cut-patterning | ∙ composite (AgNW/DS) | ∙ cut-patterned composites | This work |
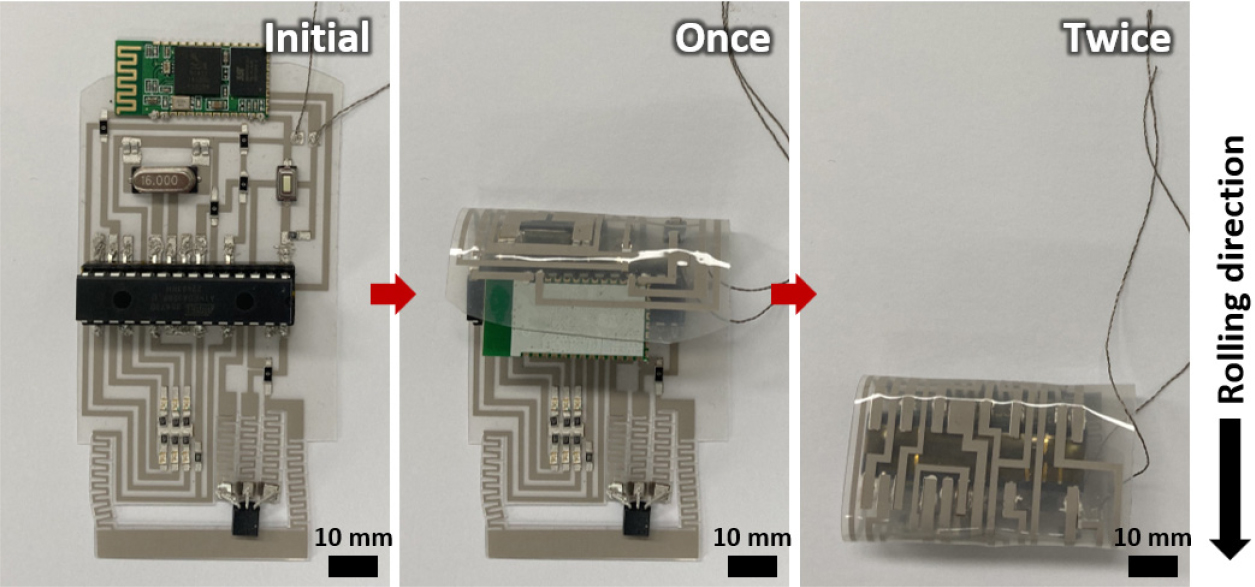
Fig. 5는 인장력이 인가될 때의 센서 시스템의 디지털 이미지를 보여준다. Fig. 5(a)에서 볼 수 있는 바와 같이 제작된 센서 시스템을 길이 방향으로 약 15 % 인장하는 경우에도 센서 시스템 자체의 물리적인 손상은 발견되지 않았으며, 집적된 소자나 부품들도 물리적인 연결 상태를 안정적으로 유지하고 있음을 확인할 수 있다. 또한 인가했던 인장력을 제거했을 때에도 센서 시스템의 물리적인 형상은 인장 전 초기 상태로 잘 회복되어 우수한 기계적 가역성을 보였다. 특히 제작된 센서 시스템에 일체형으로 집적된 신축성 배선 구조에 형성되어 있는 컷 패턴은 Fig. 5(b)의 확대 현미경 이미지에서 볼 수 있는 바와 같이 인장에 따라 열리는 형태로 변형되어 인장 환경에서도 전도성 배선 전극의 전기적, 기계적 열화를 최소화하는 역할을 하며, 이러한 컷 패턴의 변형은 외력에 따라 가역적으로 발생된다. 이와 더불어, Fig. 6에서 볼 수 있는 바와 같이, 제작된 센서 시스템은 한 방향으로 돌돌 말리는 조건에서도 기계적인 안정성을 잘 유지할 수 있음을 실험적으로 검증하였으며, 이는 제안하는 센서 시스템이 굴곡을 갖는 신체의 다양한 영역에 안정적으로 부착되어 실시간 건강 모니터링 툴(tool)로 활용될 수 있는 가능성을 보여주는 결과라고 판단된다.
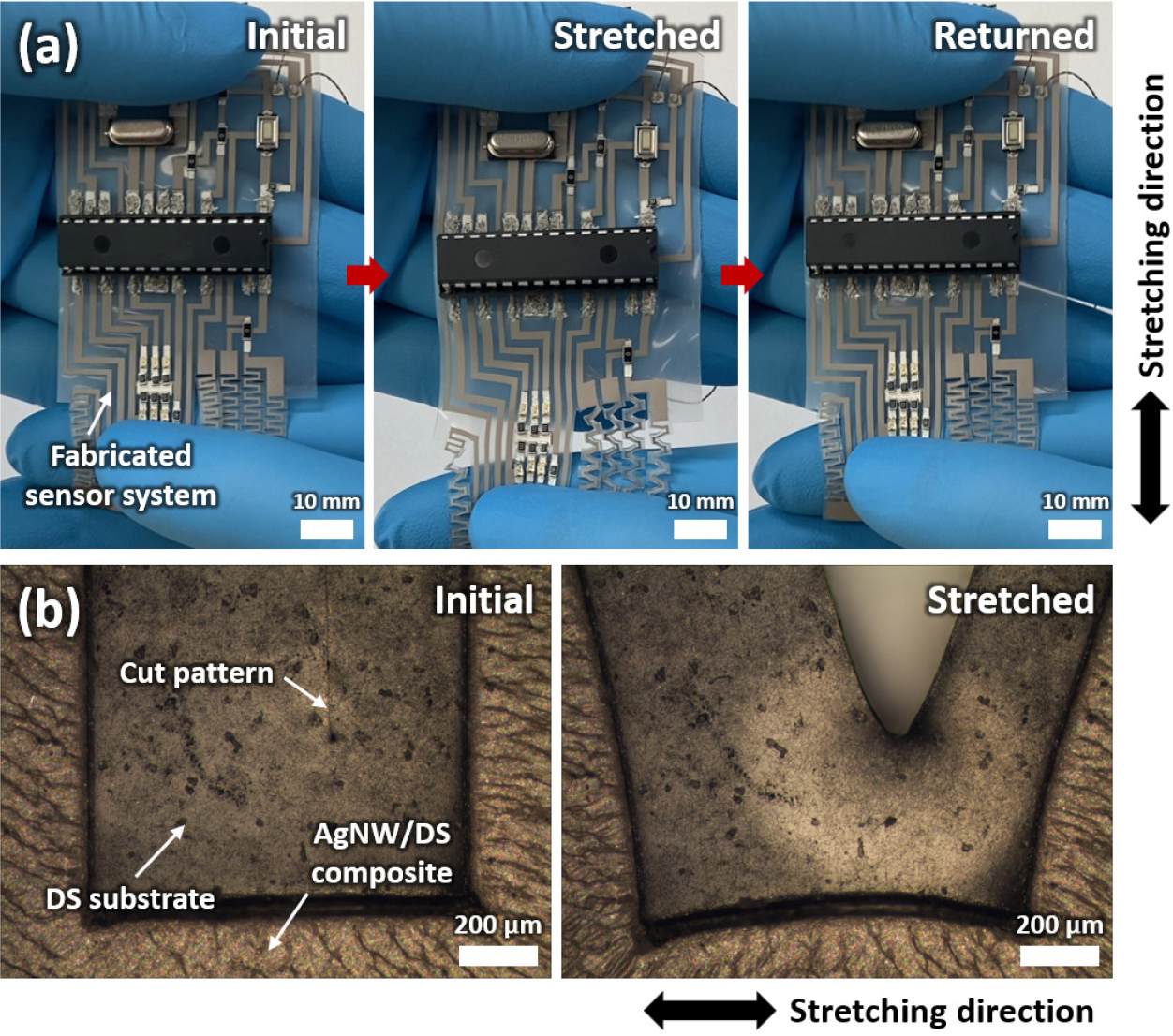
Fig. 5.
Sensor system under stretching deformation. (a) Sequential digital images of the fabricated system in the initial, stretched, and returned states (scale bars: 10 mm) and (b) optical microscope images of the cut pattern formed on the interconnection part in the initial and stretched states (scale bars: 200 µm).
제작된 피부 부착형 센서 시스템이 다양한 외력이 인가되는 환경에서도 구조적인 안정성을 유지할 수 있는 이유는 여러 가지 측면으로 분석해 볼 수 있다. 일차적으로 제작된 AgNW/DS EPCB는 신축성 폴리머(DS)를 기본 구조로 하고 있으며, 모든 회로 전극도 AgNW 네트워크가 DS 매트릭스(matrix) 내에 견고하게 임베딩(embedding)된 전도성 폴리머 복합체(AgNW/DS)로 구성되어 회로 기판 자체가 기계적인 신축성을 갖는다. 이와 더불어 회로 기판 내 함께 정의된 신축성 배선 구조는 추가 컷 구조를 갖는 구불구불한 형상의 전도체로 외력이 주어질 때 추가 컷 구조가 먼저 열리면서 기판 자체의 변형 발생을 최소화함으로써 센서 시스템의 기계적인 안정성을 확보할 수 있게 한다. 또한 선택적인 스퀴징 공정을 통해 패터닝된 전도성 에폭시는 회로 기판의 폴리머 복합체 전극과 마운팅되는 소자 간에 전기적인 연결과 더불어 견고한 접합(adhesion) 상태를 보장할 수 있어 외력이 인가되는 상황에서도 소자의 탈락 등 주목할 만한 물리적인 변형의 발생을 막아주는 역할을 한다. 이는 인체에 착용된 센서 시스템이 착용자의 일상 생활 중 발생되는 다양한 변형에 대해서도 안정적인 동작을 할 수 있음을 의미한다.
제작된 센서 시스템의 출력 신호에 대한 실시간 무선 전송 테스트는 Fig. 7(a)에 나타낸 실험 셋업(setup)을 이용하여 진행하였다. MCU에서 신호처리된 센서 출력은 블루투스 통신을 통해 노트북 또는 스마트폰 등 모바일 기기로 전송될 수 있으며, 노트북 화면에 보여지는 시간 대비 전압 그래프를 통해 센서 출력 신호를 실시간으로 모니터링할 수 있었다. 이때 센서 시스템의 구동을 위해 전원 공급기(power supply)를 이용하여 5 V의 입력 전압을 인가하였는데, 이는 향후 소형 코인 배터리나 기계적으로 유연한 배터리 등으로 대체하여 센서 및 회로 동작을 위한 전원부까지 포함한 착용형 올인원(all-in-one) 센서 시스템을 완성시킬 수 있을 것으로 기대된다.
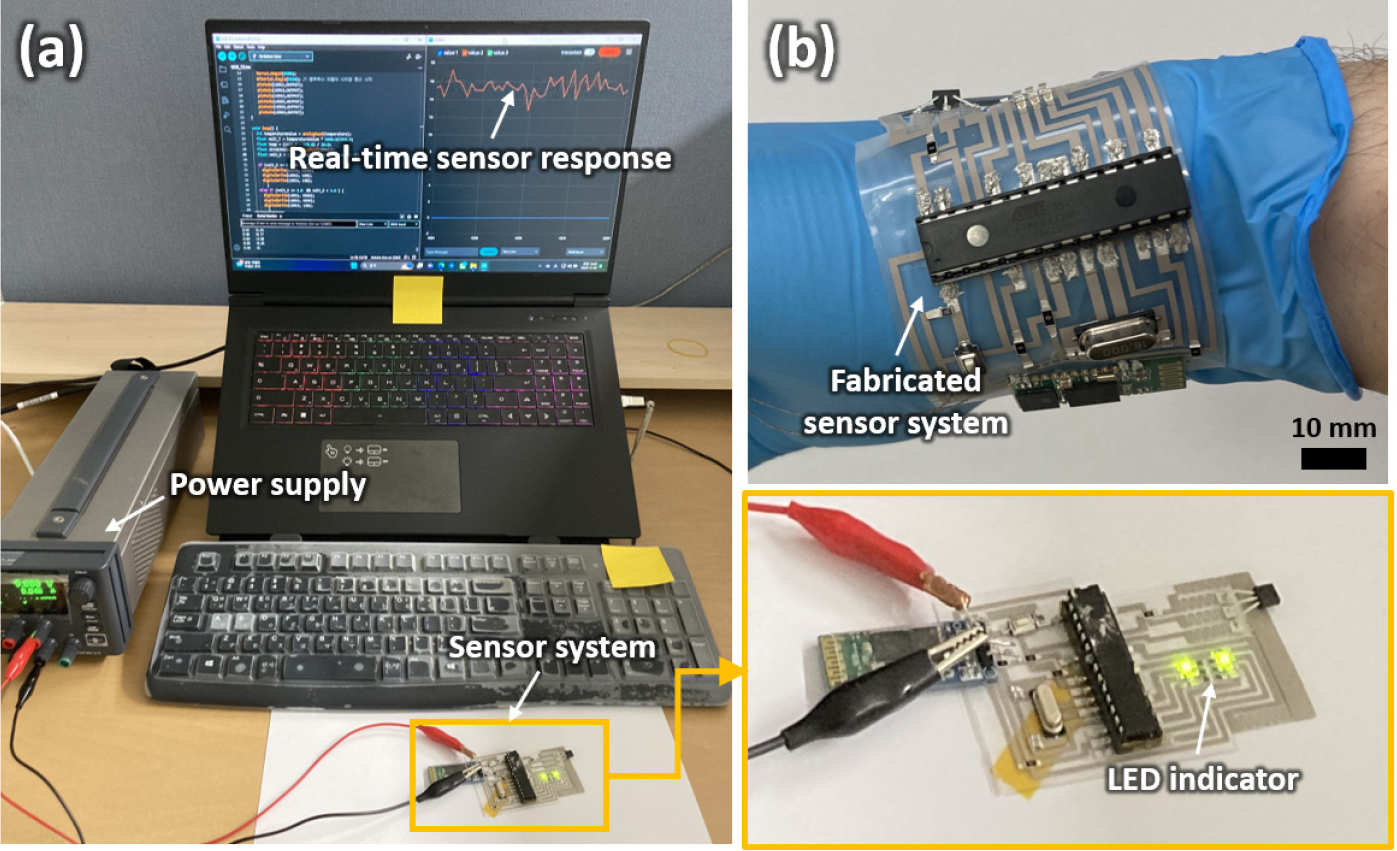
Fig. 7(b)는 손목에 부착된 신축성 센서 시스템의 디지털 이미지를 보여준다. 제작된 센서 시스템은 구조 자체의 신축성 및 유연성으로 인해 손목을 감싸는 형태로 밀착될 수 있음을 확인할 수 있다. 특히 스트레인 센서 파트를 손목 관절 영역에 정렬되도록 부착하여 손목 관절의 움직임에 따른 물리적 변형을 전기 신호로 효율적으로 변환할 수 있도록 하였다. 이는 향후 센서 시스템 부착 시 스트레인 센서 파트 정렬 위치의 조정을 통해 원하는 신체 부위의 움직임을 선택적으로 실시간 모니터링할 수 있을 뿐만 아니라 일체형 스트레인 센서 및 신축성 배선 구조의 레이아웃 설계 최적화를 통해 제작 공정의 변화없이 여러 부위의 인체 정보를 병렬적으로 획득할 수 있는 센서 어레이(array) 기술로 확장될 수 있는 가능성도 충분함을 보여주는 결과라고 판단된다.
Fig. 8은 손목에 부착된 신축성 센서 시스템을 이용하여 손목 관절의 움직임 및 주변 온도를 실시간으로 모니터링한 결과를 보여준다. Fig. 8(a)의 디지털 이미지는 센서 시스템이 부착된 손목의 굽힘 동작에 따라 LED 인디케이터 모듈이 동작하는 모습을 나타내며, 확대 사진 상의 뒤쪽에 배치된 3개의 LED 칩이 스트레인 센서의 출력 레벨을 나타낸다. Fig. 8(a)에서 볼 수 있는 바와 같이 손목 굽힘 각도의 증가에 비례하여 점등되는 LED 칩의 수가 순차적으로 증가함을 확인할 수 있으며, 이는 모니터링 대상이 되는 신체의 움직임 정도를 가시적으로도 예측해볼 수 있는 기회를 제공한다. 또한 확대 사진 앞쪽에 배열되어 있는 3개의 LED 칩은 손목 관절의 움직임과 무관하게 1개만 점등된 상태를 유지하고 있음을 확인할 수 있는데, 이는 온도 센서 출력 크기의 레벨을 나타내는 인디케이터로 움직임을 실시간으로 모니터링하는 동안 주변 온도는 비교적 일정하게 유지되고 있었음을 예측할 수 있게 한다.
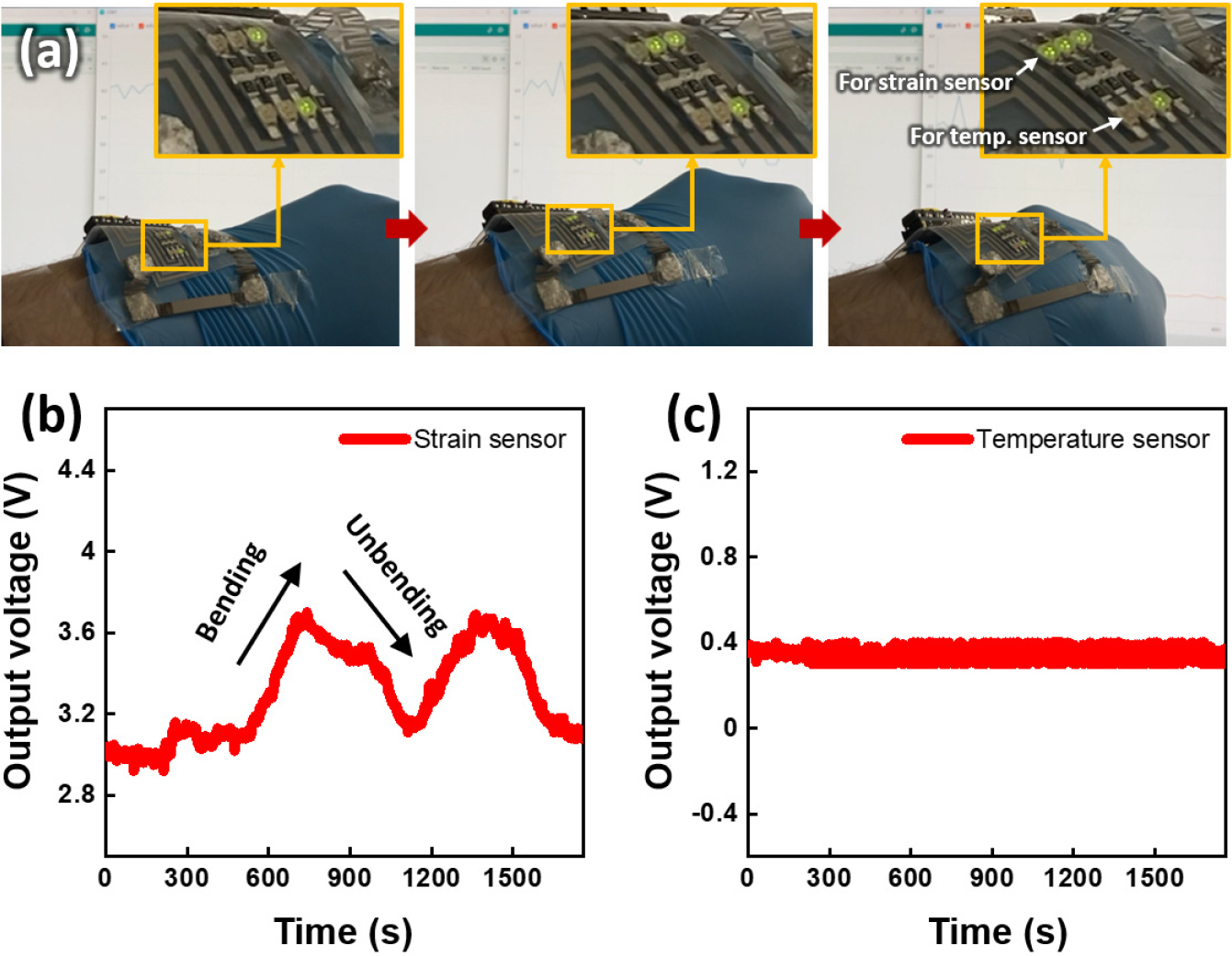
Fig. 8(b)는 손목을 굽혔다 펴는 동작을 반복할 때 실시간으로 얻은 센서 시스템의 출력 그래프를 보여준다. 손목을 굽힐 때 손목 관절 영역에 정렬된 스트레인 센서는 인장력을 받게 되므로 전도성 폴리머 복합체 상에 형성되어 있는 컷 패턴이 열리면서 저항이 증가한다. 굽혔던 손목을 다시 펴면 열렸던 복합체 센서의 컷 패턴이 다시 닫히면서 초기 상태로 복귀하게 되고, 증가했던 센서의 저항도 초기값으로 안정적으로 복귀하게 된다. 이러한 센서의 동작 메커니즘을 바탕으로 센서의 출력 전압은 손목의 굽힘 및 폄 동작에 대해 가역적인 특성을 보였다. 또한 온도 센서의 출력 전압은 Fig. 8(a)의 LED 인디케이터의 동작 결과를 통해 예측한 바와 같이 시간에 따라 일정하게 유지됨을 확인할 수 있다[Fig. 8(c)]. 한편, 본 연구에서 제안하는 EPCB는 다양한 센서 칩의 마운팅이 용이하여 응용 목적에 맞는 성능을 갖는 온도 센서를 집적하여 주변 온도를 보다 정밀하게 모니터링할 수 있는 충분한 확장성이 있다. 이러한 실험 결과는 본 연구에서 제안하는 신축성 센서 시스템이 착용형 센서로 활용될 수 있는 가능성이 높다는 것을 보여준다. 본 연구에서는 신축성 센서 시스템 기술을 구현하기 위한 효율적인 방법을 제안하는 것을 일차적인 목표로 하고 있지만, 제안 기술의 실효성을 검증하기 위해서는 향후 센서 시스템의 체계적인 성능 분석 및 최적화 과정이 필요하다고 판단되며, 이러한 과정을 통해 보다 실용적인 실시간 인체 모니터링 툴로 발전될 수 있을 것으로 기대된다.
4. 결 론
본 연구에서는 저항형 스트레인 센서가 일체형으로 집적된 전도성 폴리머 복합체 회로 기판을 기반으로 한 신축성 무선 센서 시스템을 제안하였다. 제안하는 피부 부착형 EPCB는 소자 마운팅 파트, 신축성 배선 파트 및 스트레인 센서 파트로 구분하여 설계되었다. AgNW/DS 복합체 직접 컷 패터닝 기술을 기반으로 스트레인 센서 집적 신축성 회로 기판을 제작하고 전도성 에폭시 패턴을 이용하여 회로 기판의 설계된 위치에 MCU, 회로 소자, LED 칩, 온도 센서 및 블루투스 모듈을 마운팅함으로써 착용형 센서 시스템을 성공적으로 구현하였다. 제작된 신축성 센서 시스템은 기계적인 신축성 및 유연성으로 인해 늘리거나 돌돌 마는 물리적인 변형에 대해서도 구조적인 안정성을 유지할 수 있었으며, 굴곡을 갖는 손목에도 밀착되어 부착될 수 있었다. 손목에 부착된 센서 시스템을 통해 손목 관절의 움직임 및 주변 온도에 따른 센서 응답의 크기를 LED 인디케이터를 통해서 예측함과 동시에 센서 출력을 무선으로 전송하여 실시간 모니터링의 가능성을 실험적으로 확인함으로써 제안 기술이 실용적인 착용형 센서 모듈로 활용될 수 있음을 검증하였다.
